Suites II
Rose User Guide: Suites II
What does this cover?
What does this part cover?
- suite design
- cylc capabilities
- cylc gui
What does this part cover? continued
- Rose Bush, and other Rose utilities
- Built-in applications - fcm_make, rose_ana, rose_prune...
- In Depth Usage
Dependency Syntax a | b
If task c depends on either task a or task b:
[scheduling]
[[dependencies]]
graph = a | b => c
If both task b and task c depend on task a:
[scheduling]
[[dependencies]]
graph = a => b & c
Dependency Syntax b & c
If task b only runs when task a fails:
[scheduling]
[[dependencies]]
graph = a:fail => b
If task b runs after task a starts:
[scheduling]
[[dependencies]]
graph = a:start => b
Dependency Syntax a[-PT6H]
In a cycling suite, with cycles every 6 hours, if task a depends on a previous cycle's task a succeeding:
[scheduling]
[[dependencies]]
[[[T00, T06, T12, T18]]]
graph = a[-PT6H] => a
If task b depends on the previous cycle's task a failing:
[scheduling]
[[dependencies]]
[[[T00, T06, T12, T18]]]
graph = a[-PT6H]:fail => b
Dependency Syntax a & ( b | c )
If task d depends on task a and either task b or task c succeeding:
[scheduling]
[[dependencies]]
graph = a & ( b | c ) => d
Dependency Syntax a => !b
If task b is not needed when task a succeeds, it can be suicide triggered:
[scheduling]
[[dependencies]]
graph = a => !b
Typically, b would be a failure recovery task that should never run if a succeeds, but should be run after a fails:
[scheduling]
[[dependencies]]
graph = """
a => !b
a:fail => b
"""
Dependency Syntax a => !b (2)
See the suicide triggering tutorial for more details.
Dependency Syntax a => FAMILY_B
If all the tasks in FAMILY_B should run when a succeeds:
[scheduling]
[[dependencies]]
graph = a => FAMILY_B
Dependency Syntax FAMILY_A:succeed-any => b
If task b should run when any task in the FAMILY_A family succeeds:
[scheduling]
[[dependencies]]
graph = FAMILY_A:succeed-any => b
If task b should run when all tasks in the FAMILY_A family have finished (whether succeeded or failed):
[scheduling]
[[dependencies]]
graph = FAMILY_A:finish-all => b
Dependency Reference
Full details of dependency configuration are in the cylc User Guide, including:
- more namespace (family) triggers - triggers based on groups
- clock-trigger tasks - tasks triggered at certain wallclock times
- max active cycle points - prevent too many cycles being active at any one time
- message triggers - triggers based on task output
Cylc Capabilities
cylc has some nice capabilities:
- inserting tasks at runtime
- limiting the number of tasks in a family running at any one time (queues)
- giving manual control over the status of tasks
Cylc Capabilities (Continued)
- automatically resubmitting tasks that have failed, optionally with different environments or commands (retries)
- automatically resubmitting tasks when submission fails (submission retries)
- restarting suites
Cylc Capabilities (Continued 2)
- broadcasting runtime changes to a particular
task or cycle within a running suite (
cylc broadcast) - reload the suite.rc settings for a running suite
Environment
There are some useful environment variables that you can use in your suite.rc file and Rose applications:
- ROSE_SUITE_DIR, root directory of the running suite.
- ROSE_TASK_NAME, name of the suite task.
- ROSE_TASK_CYCLE_TIME, cycle time of the suite task.
Environment (2)
- ROSE_DATA, data directory of the suite.
- ROSE_DATAC, data directory for tasks in this cycle time.
- ROSE_ORIG_HOST, host that invoked 'rose suite-run'.
Environment (3)
- ROSE_TASK_LOG_ROOT, the path where log files for a task are stored without the file extension - if you create a file in this directory it will be associated with the task in the suite log viewer.
Environment Reference
For more, see rose task-env
and the
cylc User Guide. Note: to reference Rose
environment variables in your suite.rc
file, you'll need to use rose task-env
in the env-script runtime
setting (tutorial here).
cylc-run Directories
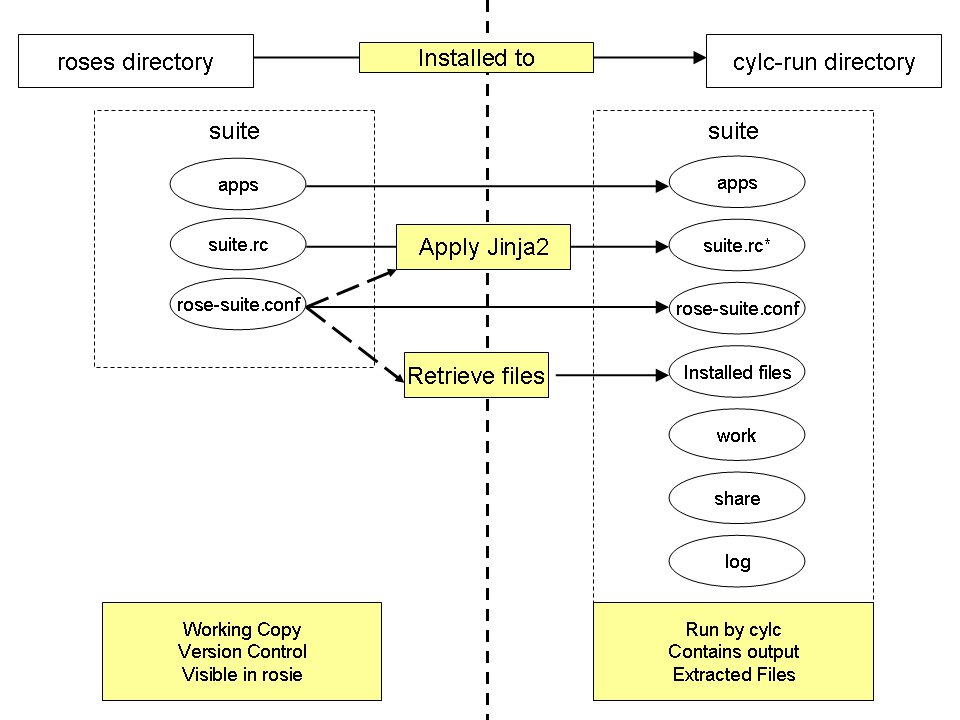
cylc keeps a runtime directory for each suite in ~/cylc-run/, which is updated when you run the suite.
It is a mirror of your suite directory structure and content, but with some added cylc directories and symbolic links (e.g. share/). These hold things like installed files, current task statuses, and task output.
cylc-run directories: roses vs cylc-run
cylc-run directories: share/, share/cycle/, work/
share/, share/cycle/ and work/ sub-directories:
- Usually symbolic links to data directories.
- share/ is intended for any files that need to be shared between tasks during the lifetime of the suite.
- share/cycle/ is intended for any files that need to be shared are regularly generated, archived and removed by cycling tasks.
- work/ contains task
working
directories, e.g. containing Rose application namelists and other temporary files
cylc-run directories: log/
log/, log.*/ sub-directories:
- The suite subdirectory contains the suite logs, including STDOUT and STDERR outputs.
- The job/ subdirectory contains the job scripts for submitting the tasks, their STDOUT and STDERR outputs.
- Rose adds the rose-suite.version file, which records any version control information about the suite, including any local modifications.
Suite Design
Good Practice

- Having read the cylc and Rose documentation before writing the suite
- Using families where appropriate
- Condensing repeated settings or blocks with Jinja-2
Good Practice (continued)
- Single, well-commented suite.rc file
- Rerunnable tasks, doing one thing and doing it well
- Using Rose standard environments, utilities, standard suite templates, and the recommended event handlers.
Bad practice

- Skipping the cylc and Rose documentation
- Repeated runtime settings
- Obfuscating the suite.rc with Jinja2
Bad practice (continued)
- Overusing include files
- Magical, black box tasks with suite-level functionality
- Reinventing the (Rose) wheel
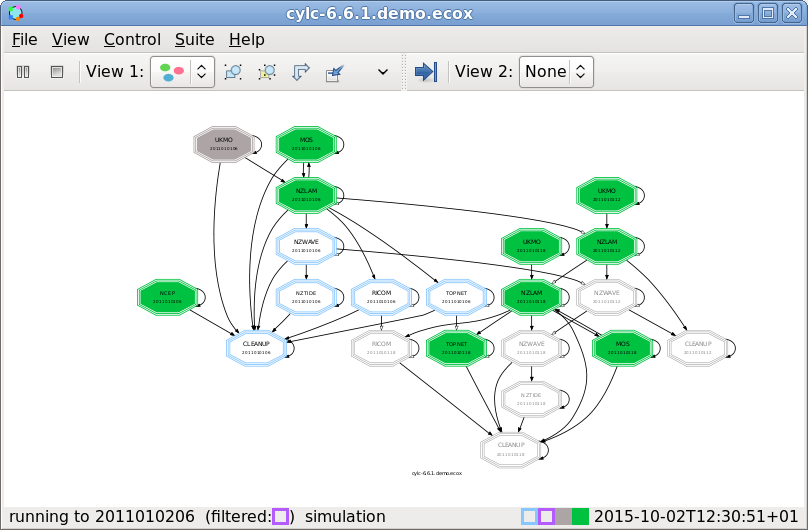
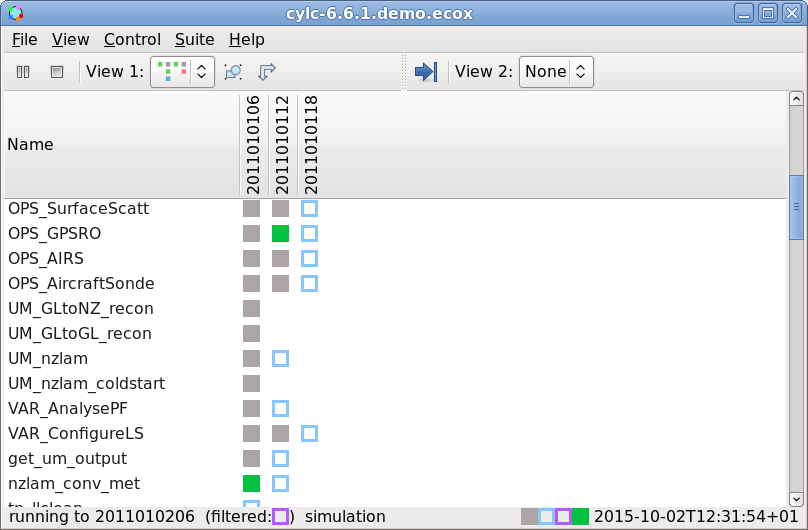
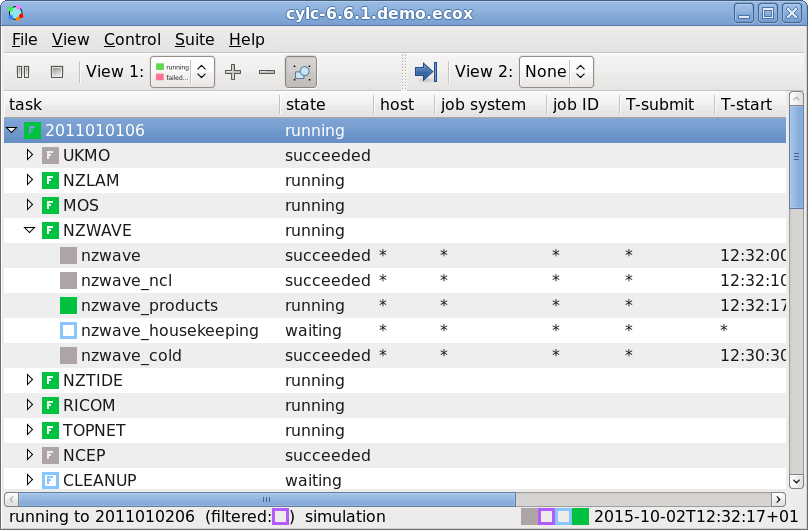
cylc gui
- Usually launched by
rose suite-runor using the commandsrose suite-gcontrol(rose sgc) orcylc gui SUITE-NAME. - Three views - graph, dot (square now!), tree.
- Easy interface to start, pause (hold) and stop the suite.
- View task states, and job.out, job.err, etc files for task jobs.
- Poll and kill submitted and running task jobs.
- Manually trigger tasks and reset task states.
{kind=link}
{kind=link}
{kind=link}
cylc gscan
- Monitor all your running suites on a set of suite hosts from a single GUI.
- Launch
cylc guifor individual suites.
Rose Bush
Browse suite logs via HTTP.
View suite status on your web browser. Can be
launched using rose suite-log.
Rose Built-in Applications
- fcm_make - built-in application to
run
fcm make - rose_ana - an engine to perform analysis on program outputs
- rose_arch - archive output
- rose_prune - housekeep a cycling suite
- rose_bunch - run multiple command variants in parallel
Suite Utilities
- rose date - flexible way to manipulate date/time strings with or without an offset.
- rose host-select - configurable remote hosts selector
Tidying Up Runtime Directories
Run rose suite-clean SUITE_NAME
[...] to delete suite output in the
~/cylc-run/SUITE_NAME/ directories. The
command removes the actual locations of
share/, share/cycle/ and
work/ (which may be symbolic links), as
well as the ~/cylc-run/SUITE_NAME/
directory structure in each job host of the latest
run.
Tidying Up Rosie Suites
Run rosie delete SUITE_NAME to
delete SUITE_NAME from the HEAD of its
Rosie Subversion repository as well as the
~/roses/SUITE_NAME/ directory.
If you only want to remove the
~/roses/SUITE_NAME/ directory, you can
run rm -rf ~/roses/SUITE_NAME or
rosie delete --local-only
SUITE_NAME.
Independent Learning
Next Steps:
- If you haven't already done so, go through the Suite Writing Tutorial.
- Have a look at some of the Advanced Suite Tutorials.
- Have a go at the Rose Quiz